-
About Me
I obtained my Bachelor's degree in Electrical and Information Engineering from Zhejiang University City College in 2015, and Master of Science's degree in Electrical Engineering from Colorado State University in 2018. After that, I joined Vision based automation science and engineering ( VBASE ) Lab in Harbin Institute of Technology, Shenzhen, as a Research Assistant with Prof. Xin Jiang . During that time, I am focusing on solving problems about applying simultaneous localization and mapping (SLAM) in autonomous mobile manipulator robots. I am devoted to multi-sensor fusion part, such as fusing SLAM system with sensors like wheel-encoders, kinematics, 2D LiDAR, and Stereo Camera to enhance the accuracy and robustness of SLAM system working in construction scenarios. I am also focusing on the SLAM combined with object and layout understanding. Currently, I join Shenzhen Innovation and Technology Research Institute (Futian), The Chinese University of Hong Kong, as a Research Assistant, advised by Prof. Yun-Hui Liu. I am mainly focusing on LiDAR-based SLAM and reconstruction, as well as motion planning for mobile manipulator robots. -
Research Interests
My work focuses on autonomous information collection using vision and LiDAR sensors equipped on the robots for localization and mapping, environmental monitoring, and security and surveillance. I also focus on scene understanding problems that perceive geometry and semantic information to improve the autonomy of robots. The relevant fields of my interesting research are Visual/LiDAR SLAM, Multi-sensor fusion, Semantic mapping, 3D modeling, Robotics, Computer Vision, Deep learning, Autonomous Vehicles. -
Research
A robust, high-precision LiDAR odometry and mapping with Robot Kinematics Constraint In this work, we present a robust, high-precision LOAM algorithm for small FoV 3D LiDARs (such as, Livox sensors). In contrast to the popular use of inertial measurements, we primarily involve the robot kinematics model as a prior constraint in LOAM algorithm. The reason is that during some movements of robots (e.g. straight one with low constant speed, sudden starting/braking), the pre-integration of IMU dominated by signal noise and bias. By taking effort on both front-end and back-end, our proposed algorithm achieves better performance in both robust and precision compared to existing baselines.
Low-Drift RGB-D SLAM with Room Reconstruction Using Scene Understanding Zefeng Ye, Xin Jiang, Yun-Hui Liu
IEEE International Conference on Robotics and Biomimetics, 2021 (Accepted)
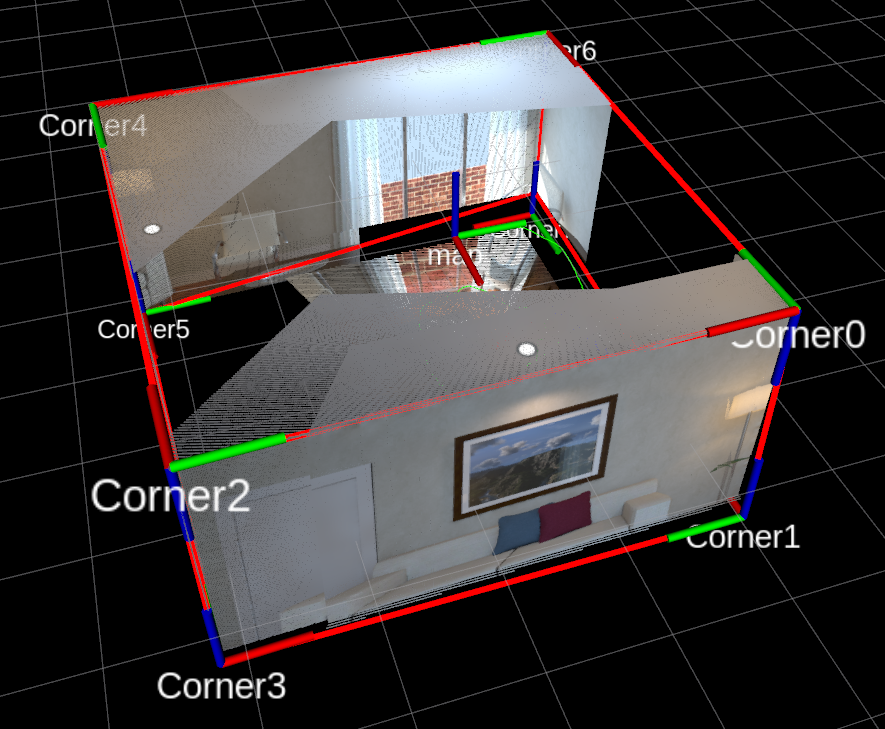
In this work, we present an architecture for online, incremental room reconstruction which combines an accurate RGB-D SLAM and room layout understanding. We proposed an efficient scene understanding method, which detects room's corners to infer the wireframes and layout planes of room from single RGB-D image, even if the parts of the room are occluded. Moreover, the 3D global features (wireframes and layout planes of the building) can also improve the accuracy of state estimation, especially in geometric indoor environments. These 3D global features are treated as global consistent landmarks, it efficiently bounds the trajectory drift with the travel length increasing. On a public ICL-NUIM dataset, our algorithm achieves higher accuracy than other state-of-arts, and it also builds a geometrically meaningful map.
[Preprint PDF]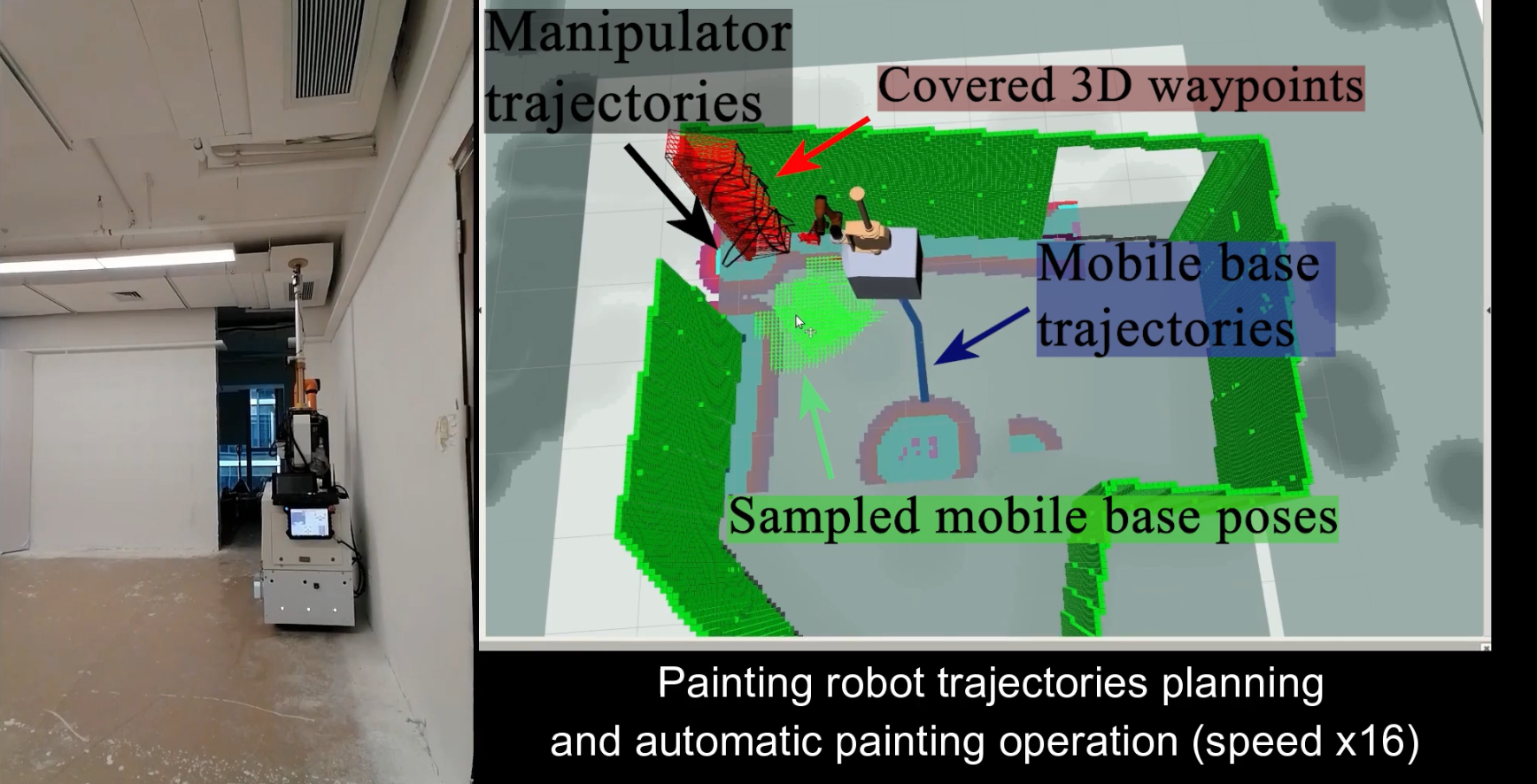
Development of an Automatic Robot for Interior Wall Painting (Under Review) Yang Zhou, Zefeng Ye, Linzhu Yue, Linhai Gui, Xin Jiang, Xiang Li, Peng Li, Yun-hui Liu
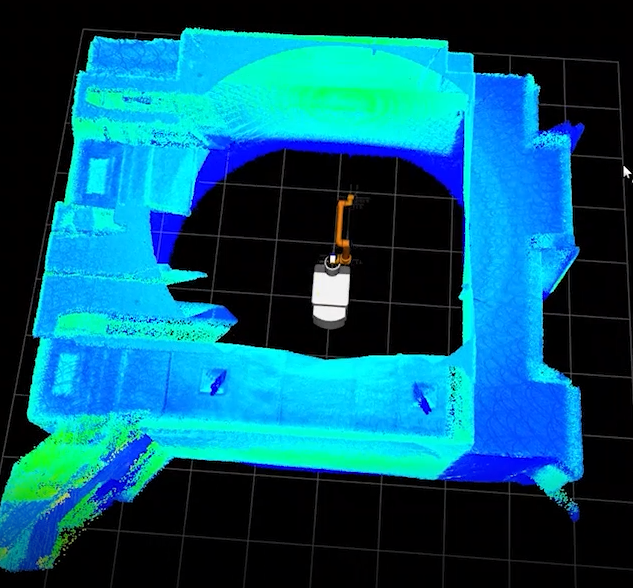
In this work, we propose a full-coverage wall painting framework for the automatic interior painting robot, which ables automatic perception in the construction site through 3D LiDAR and performs full-coverage painting planning with smooth execution trajectories. A modeling algorithm is designed to establish the relationship between the building point cloud and painting coverage, it allows detecting layout planes and corners as well as sampling candidate 3D coverage waypoints by the spray gun's sector field. Moreover, a novel painting coverage planner which generates optimal robot base poses and manipulator trajectories is proposed for fully painting the walls. We conduct experiments on a realistic interior painting robot to validate the performance of the developed framework (painting path reduced: 56.2%, painting efficiency: 40sec/m2).
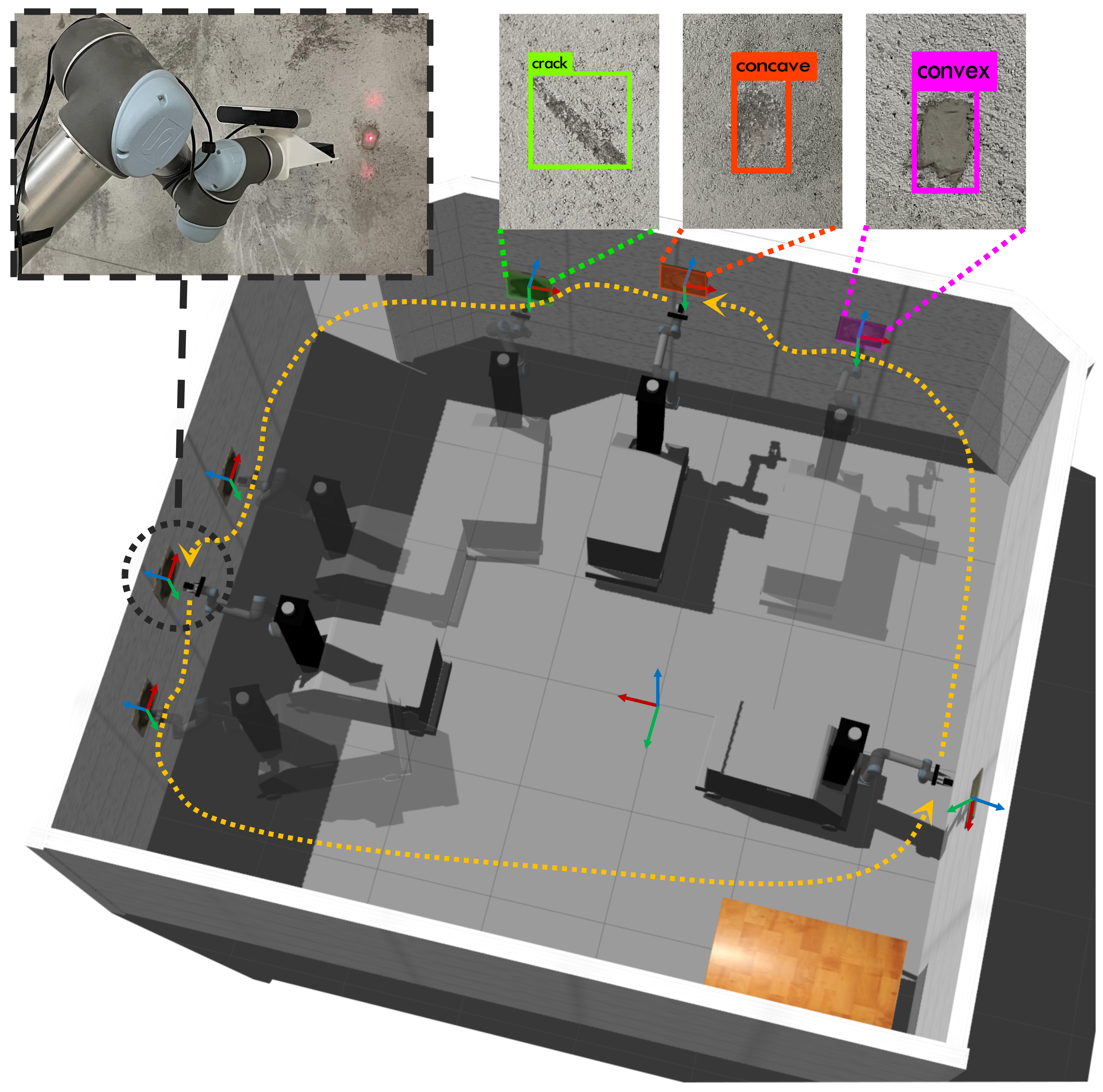
A Wall Defects Based Semantic SLAM System for Autonomous Interior Finishing Robot (Under Review) Zefeng Ye, Changheng Sun, Xin Jiang, Yexi Chen, Honghai Zhang, Yun-Hui Liu
Facing the aging problem, it is widely recognized that deploying autonomous interior finishing robots is the efficient solution for the construction industry. However, realizing the necessary autonomy in construction scenarios represents a big challenge because of the complexity of the construction environment (drastic illumination variation, monotonous texture on the walls, uneven floor, etc.). In this paper, we propose a fully-integrated robot-centric semantic SLAM system for the mobile manipulator robots. It enables the robots to achieve globally accurate localization along with wall defects awareness mapping. These functions greatly benefit their navigation in complex construction workspace. A novel state estimator based on tightly coupled sensor fusion is proposed. It jointly optimizes the robotic states and wall-defect poses with heterogeneous constraints (stereo camera, 2D LiDAR, wheel-encoders, kinematics, and prior BIM map) in a factor graph. The estimator provides the global accuracy and robustness in pose estimation of end-effector, even without loop closure. For quality inspection of walls, a centimeter-level wall defects-based semantic mapping is proposed to detect and register wall defects to the prior map of the construction site. By improving the accuracy of object-level mapping for wall defects with small size, this paper proposed a pixel-wise iterative optimization-based triangulation method and a 2D/3D IoU-based association method to fill the gap between the object-level SLAM with wall defects. The proposed system is validated in both simulation and real construction sites. The experimental results proved its effectiveness.
- •
- 1
- •